EN
- English
- Français
- Deutsch
- Español
- Èeština
- Italiano
- 日本語
- 한국어
- Português Brasileiro
- Pусский
- 简体中文
- 繁體中文
- Polski
|
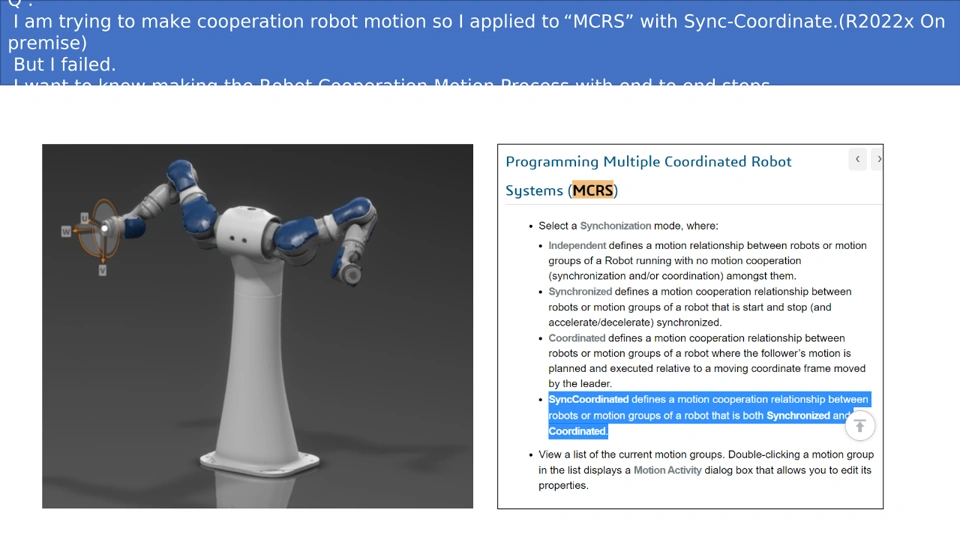
I am trying to make cooperation robot motion so I applied to “MCRS” with Sync-Coordinate.(R2022x On premise)
But I failed.(Please refer to the file(pptx))
I want to know making the Robot Cooperation Motion Process with end to end steps.